

4つのモーターで水平昇降
4軸のステッピングモーターで昇降できるウィンチを作ることにしました。
なぜ普通のブラシモーターを使わないかというとステッピングモーターってトルクが強く、静止時にギアがなくても保持していることができて、比較的ゆっくり回せるからです。
巷には3Dプリンターのおかげで出回っています。
こんな感じで作ります。
Arduinoで細かい制御をして、Raspberry Piからのコマンドで動くことにします。
と、ん?
こういうボードはどっかで見たよな。
あ、あれだ。
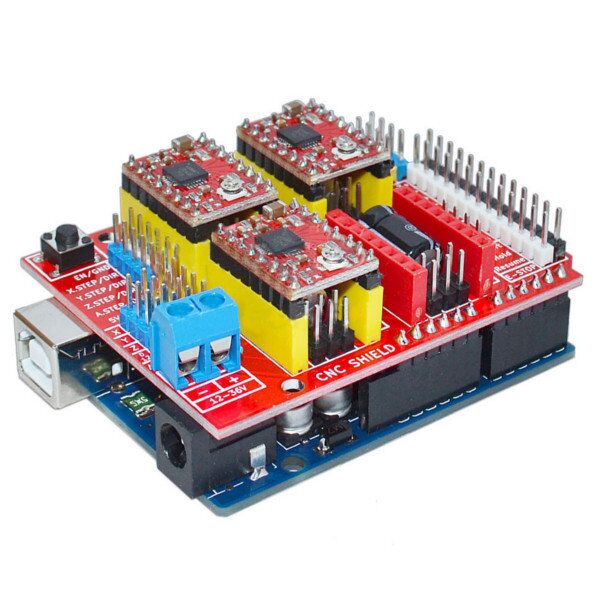
CNCマシン用のボード。
とくにArduinoに乗っけるピンが完備したボードを”シールド”と呼ぶ風習があります・
このボードはCNCマシンのキットに使われていて、GRBLというオープンソースで駆動します。
何年か前にさんざんいじってたヤツ。
とてもポピュラーで、ボードは激安で売られています。
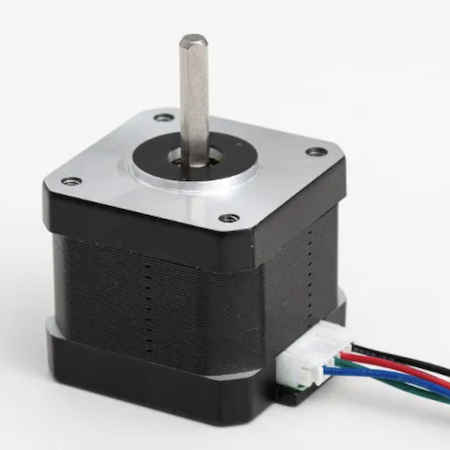
とりあえず4個モーターがついたキットを購入。モーターは4401タイプなのだそうだ。
ボードのバージョンは無印のV3.0です。

ボードチューニング
4401は12Vで200カウントで一回転する。最大電流は1.7Aです。
モータードライブモジュールはA4988という最大で2A程度がドライブできます。Arduino Uno R3もコネクターは12Vまでサポートしているので電源は12Vで決まりです。
ドローン基盤から取れるということですね。どうするかは未定だけど。
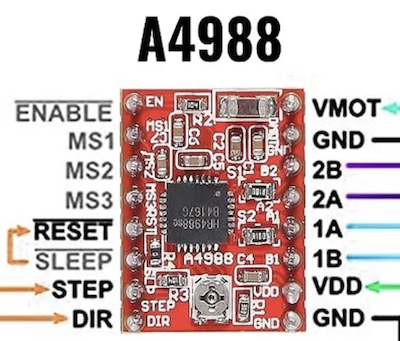 A4988ボードはのっかっている極小のボリュームで最大出力電流をコントロールできます。
A4988ボードはのっかっている極小のボリュームで最大出力電流をコントロールできます。
GNDとボリュームの中心にテスターをあて、電圧を測ります。もっとも右にまわして1.5Vくらいのはずです。
最大にすると結構発熱するので、4401モーターを使っている限りにおいては、中間(0.7Vくらい?)にしておいたほうがいいと思います。
MS0, MS1, MS2はドライブの精度をあげる場合に設定しますが、今回は回転数で数えるくらいの精度でいいので全部LOWにします。
なお、すべてのロジックは5V仕様となります。
ドローン系(Raspberry PI)は3.3V仕様ですから、接続時に5V-3.3Vのレベルコンバーターを挟む必要がありますが、以下のようにUSBインターフェースを使えば、そんな悩みはないです。
GRBL使っていた時にはArduinoとコントローラーのボードのピン配列なんか考えずに、言われたとおり繋いでいればよかったんですが、自分でコード書くならばそうもいきません。
とはいってもシールドのピンレイアウトは比較的どうでもいいです。
大事なものはこれ。
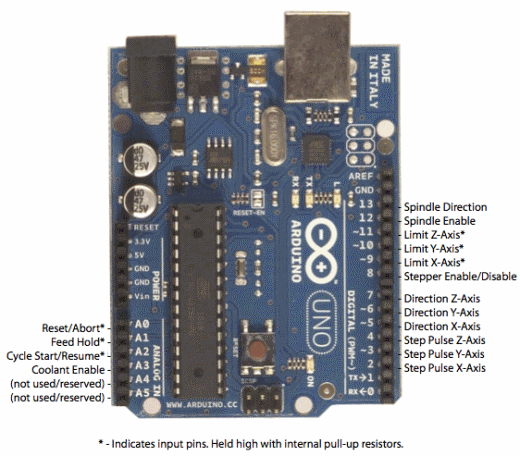
ここEnable, Direction, Stepが重要なピンです。
しかし!ここにはX,Y,ZしかなくAドライブについてはポートがありません!
それはこの動画(https://www.youtube.com/watch?v=UZcyh9qgwyQにあるとおり、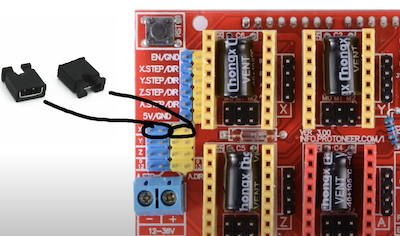
とジャンパーすればXドライブと同じようにAドライブは動くのです。
Aドライブはあくまでもフォロワーとして動くのですね。
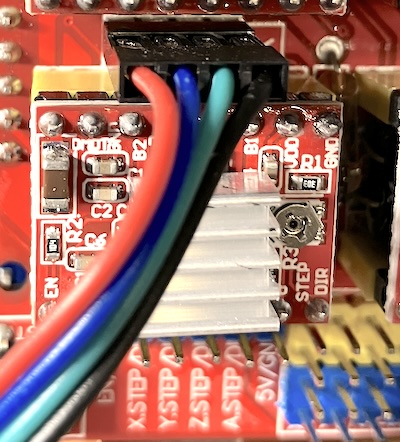
A4988の電流制限(ポテンショメーターとGND間の電圧調整)はか習うやります。私の場合は0.45-0.46Vくらいで調整しています。
これをやらないと、ちょっとモーターに負荷がかかっただけで過電流となりモーターが逆回転を始めます。A4988のドキュメントをさらっと見ても記載は見つけられませんでしたが、現象としてワイヤーがひっかかりモーターに負荷がかかると勝手に逆回転する現象に遭遇しています。対策がこの電流調整でした。
なお、モーターケーブルの差し込みはこの方向にしました。反対でも当然動作しますが、統一しましょう。
モーターテスト
ボードに12V電源を繋いで、
Arduinoプログラムでのピンの定義
const int stepXPin = 2; //X-軸 ステップ
const int stepYPin = 3; //Y.軸 ステップ
const int stepZPin = 4; //Z.軸 ステップ
const int dirXPin = 5; // X-軸 方向 1-CW 0-CCW
const int dirYPin = 6; // Y-軸 方向
const int dirZPin = 7; // z-軸 方向
const int enPin=8; // スピンドル エネイブル
とりあえずX軸用モーターが回るプログラム
const int stepXPin = 2; //X-軸 ステップ
const int stepYPin = 3; //Y.軸 ステップ
const int stepZPin = 4; //Z.軸 ステップ
const int dirXPin = 5; // X-軸 方向 1-CW 0-CCW
const int dirYPin = 6; // Y-軸 方向
const int dirZPin = 7; // z-軸 方向
const int enPin=8; // スピンドル エネイブル
const int stepsPerRev=200; // 200カウントで1回転
int pulseWidthMicros = 100; // microseconds パルス幅
int millisBtwnSteps = 1000; // 動作待ち時間
boolean direction = HIGH;
void setup() {
Serial.begin(9600);
pinMode(stepXPin, OUTPUT);
pinMode(stepYPin, OUTPUT);
pinMode(stepZPin, OUTPUT);
pinMode(dirXPin, OUTPUT);
pinMode(dirYPin, OUTPUT);
pinMode(dirZPin, OUTPUT);
pinMode(enPin, OUTPUT);
digitalWrite(enPin, LOW);
Serial.println("End of Initialization");
}
void loop() {
// directionのロジックはわかりやすくするためダサダサです。
if (direction == HIGH){
digitalWrite(dirXPin, HIGH); // CW
direction = LOW;
} else {
digitalWrite(dirXPin, LOW);
direction = HIGH;
}
delay(100);
for (int i = 0; i < stepsPerRev; i++) {
digitalWrite(stepXPin, HIGH);
delayMicroseconds(pulseWidthMicros);
digitalWrite(stepXPin, LOW);
delayMicroseconds(millisBtwnSteps);
}
delay(1000);
}高度化させるためにいろいろなステッピングモーターコントロールプログラムを調べました。
困ったことにオープンソースの3DプリンターやCNCはモーターを一時点でひとつしか動かさないようで、stepperdriverやAccelStepperといったライブラリーは連続してモーターを回せない(360度回すと一瞬止まる)し動きがカクカク、同時に複数のモーターを動かせないようです。(なにか方法があるかもしれません。)
単なる昇降なので、自前でコードを書くほうがわかりやすく安心です。
単体ドライブのコードとの違いはdelayです。delaymaicrosecondsで待つと、モーター4台が同時に回りません。おかしな動きをします。
上の方法を拡張した次をみてください。
/* * X,Y,Z stepper Motor test * A Stepper should be controlled by jumper pins. * by Tsukasa Takao 2023 */ const int stepXPin = 2; //X-軸 ステップ const int stepYPin = 3; //Y.軸 ステップ const int stepZPin = 4; //Z.軸 ステップ const int dirXPin = 5; // X-軸 方向 1-CW 0-CCW const int dirYPin = 6; // Y-軸 方向 const int dirZPin = 7; // z-軸 方向 const int enPin=8; // スピンドル エネイブル const int stepsPerRev=200; // 200カウントで1回転 int pulseWidth = 3; // ミリで十分。microsecondsは駄目 void setup() { Serial.begin(9600); pinMode(stepXPin, OUTPUT); pinMode(stepYPin, OUTPUT); pinMode(stepZPin, OUTPUT); pinMode(dirXPin, OUTPUT); pinMode(dirYPin, OUTPUT); pinMode(dirZPin, OUTPUT); pinMode(enPin, OUTPUT); digitalWrite(enPin, LOW); Serial.println("End of Initialization"); } void rotate(int count){ Serial.println("Start Rotation"); for (int i = 0; i < stepsPerRev*count; i++) { digitalWrite(stepXPin, HIGH); digitalWrite(stepYPin, HIGH); digitalWrite(stepZPin, HIGH); delay(pulseWidth); digitalWrite(stepXPin, LOW); digitalWrite(stepYPin, LOW); digitalWrite(stepZPin, LOW); delay(pulseWidth); } Serial.println("End Rotation"); } void moveDown(){ digitalWrite(dirXPin, HIGH); digitalWrite(dirYPin, LOW); digitalWrite(dirZPin, HIGH); rotate(10); } void moveUp(){ digitalWrite(dirXPin, LOW); digitalWrite(dirYPin, HIGH); digitalWrite(dirZPin, LOW); rotate(10); } void loop() { moveDown(); delay(1000); moveUp(); delay(1000); }
いろいろ調べても同時にステッピングモーターを回したい人はあまりいないらしく、おかしな動きも自己解決するしかありませんでした。
*長いので続きは次の投稿で