


ここまで
でハードウェアの準備をし、
で、ソフトウェアの研究を積み重ねてきました。
あらためて全体のシナリオを確認します。
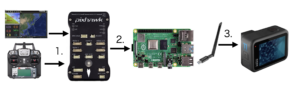
- GCSやプロポのスイッチからフライトコントローラーへカメラシャッターを要求する信号が飛びます。
- フライトコントローラーはAUX GPIOをHighにすることでRaspberry Piにシャッターコマンドを中継します。
- Raspberry PiはあらかじめGoProとhttpでの交信を確立していて、GoProにシャッターコマンドを送ります。
最終的なプログラムは次のとおりとなります。(このプログラムは古いです。写真を撮るだけならば動作しますが、実用上は以下の4のGPSデータの取得が必要です。)
4. Raspberry Pi上でDrone Kitなどを使いフライトコントローラーから船体位置のGPSデータを取得するために、テレメトリー接続をします。
前提はOpen GoProのインストールが必要です。
pip install open-gopro同時に30秒おきにKeepAliveを送っています。
2024/4/23に、GPIOがラズパイOSで動かなくなっているので、推奨されているgpiozeroの使用に書き換えました。
"""
gopro-fc.py
This program scenario is;
1. establish connection to GoPro
2. wait for GPIO(SIGNAL_PORT)
3. Send Shutter command to GoPro
4. Frequently send keep alive command to GoPro
Therefore this program has infinite loop
10/12/2023 First Edition. By Tsukasa Takao
4/23/2024 Second Edition. GPIO->gpiozero
"""
import requests
import time
import json
import threading
from gpiozero import Button
SIGNAL_PORT = 26
GOPRO_BASE_URL = "http://10.5.5.9:8080/"
def request_shutter():
print("Shutter requested")
response = requests.get(GOPRO_BASE_URL
+"/gopro/camera/shutter/start",
timeout=3)
# request_cmd("/gopro/camera/shutter/stop") # release
response.raise_for_status()
time.sleep(3)
response = requests.get(GOPRO_BASE_URL
+ "/gopro/camera/shutter/stop",
timeout=3)
resp=response.raise_for_status()
def request_alive(): # loop as ohter thread
while True:
response = requests.get(GOPRO_BASE_URL
+"/gopro/camera/keep_alive",
timeout=3)
response.raise_for_status()
resp = response.json()
print("Keep Alive")
time.sleep(30)
if __name__ == '__main__':
# Try photo mode.
response = requests.get(GOPRO_BASE_URL+
"/gopro/camera/presets/set_group?id=1001",
timeout=3)
# request_cmd("/gopro/camera/shutter/stop") # release
# if not good, throw error.
response.raise_for_status()
# GPIO event listner
button = Button(SIGNAL_PORT, pull_up=False)
button.when_pressed = request_shutter
# Generate keep alive thread
thread_A = threading.Thread(target=request_alive)
thread_A.start()
# Loop
while True:
time.sleep(10)
thread_A.join() # wait until thread_A
テストする時はGoProのWIFI APに繋がなければなりません。
もしRaspiとSSH接続をしている場合、有線LANか、USBキーボード+HDMIディスプレイに切り替えておかないとテストできなくなります。
ピッという音と共にモードが切り替わり、Mission Plannerで「シャッタートリガー」を押すとGoProで写真が取れます。
ターミナルをオフにしてもプログラムを動かし続けるためには
nohup python gopro-fc.py &
でいけると思います。
このプログラムはGoPro WiFiを止めると、httpがエラーを起こしますから止まります。