


ほとんど書いている人がいないのが不思議で仕方ないのだけれど、ドローンの構成部品と接続方法について調査している。
システム全体の動きを理解するというのは、エンジニアとしては当たり前だけれどドローンの世界ではマイナーな考え方のようだ。
ドローンのシステム
今、最小限のドローンを考える。

モーターを流れる電流は大きく30Aなんてものも珍しくないので、このモジュールは通常のプリント基板ではないことに注意。
モーターはESC(Electric Speed Controller)と呼ばれるがPWM信号でモーターをコントロールする。ESCはフライトコントローラーからの司令に応じてPWM信号を出す。
GPSは通常、自動運転などでは必須だ。フライトコントローラーにI2C接続されることが多いようだ。
最後にフライトコントローラーについて。
Ardupilotをコントロールソフトウェアとして使う場合、Cube か、PixHawkを使うことが多い。
ESP32を積んだ立派なコンピュータであり、ArdupilotではリモートPCにあるMission Plannerと協調して動作する。
これらは高価だ。Cube Pilot Orangeは7万円。PixHawkも2万円ほどする。
今回のパーツリスト?
- F450(昔、DJIが作ったモデルで、よくできているので参照される)フレームキット
- 9450プロペラ x 4
- Cube Orange フライトコントローラー
- Here 3+ GPS
- 防振ショックアブソーバーフレーム
- 2212 920Kvモーター x 4
- 30A ESC x 4
- 受信機 Flysky FS-IA6B https://www.youtube.com/watch?v=8ytxZWbPOfU
- 送信機 Flysky I6 AFHDS 2A, 2.4GHz マニュアル・ファーム
- リモートID (法律遵守のため)
なお、別記事に書きましたがESCキャリブレーションの都合上、I-BUS, S-BUSサポート受信機であってもチャネル3にスロットルのPWMの出力可能な受信機でないと困ることになります。
間違ってもFUTABAのR2000SBMのような受信機をGPS付きのドローンのために買ってはいけません。(私、大失敗)
つーか、FUTABAのプロポは高すぎます。FLYSKYで十分(別記事書きました)
ドローンのパーツ
F450フレーム
ドローンのフレームは通常、このように4方に広がり各々にモーターを取り付け、中央部にフライトコントローラや電源を搭載する。

中央のハブは2種類の金属板からできているが、長細いほうはモーターの電源ケーブルとパワーケーブルをはんだ付けし、分電盤を兼ねている。

プロペラはフレームの対角線の長さの半分以下でなければなりません。
プロペラ同士がぶち当たりますから。
モーターとフレーム
このようにモーターとフレームを取り付ける。
下に少し見えているのはモーターコントローラーのESCだ。
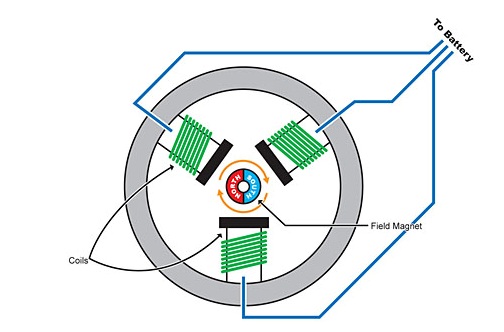
ESCとは、モーターに大きい電流をパルスで送る装置。ドローンは通常、ブラシレスモーターを使っており、パルスにより回転数を制御できるようになっている。

びっくりすることに、ESCにはA, B, Cとしか記号がなく、モーターの3本の配線はなにも記載がない。
これではどれをどれに接続するかわからないな、と思っていると、その前に重要な話があった。
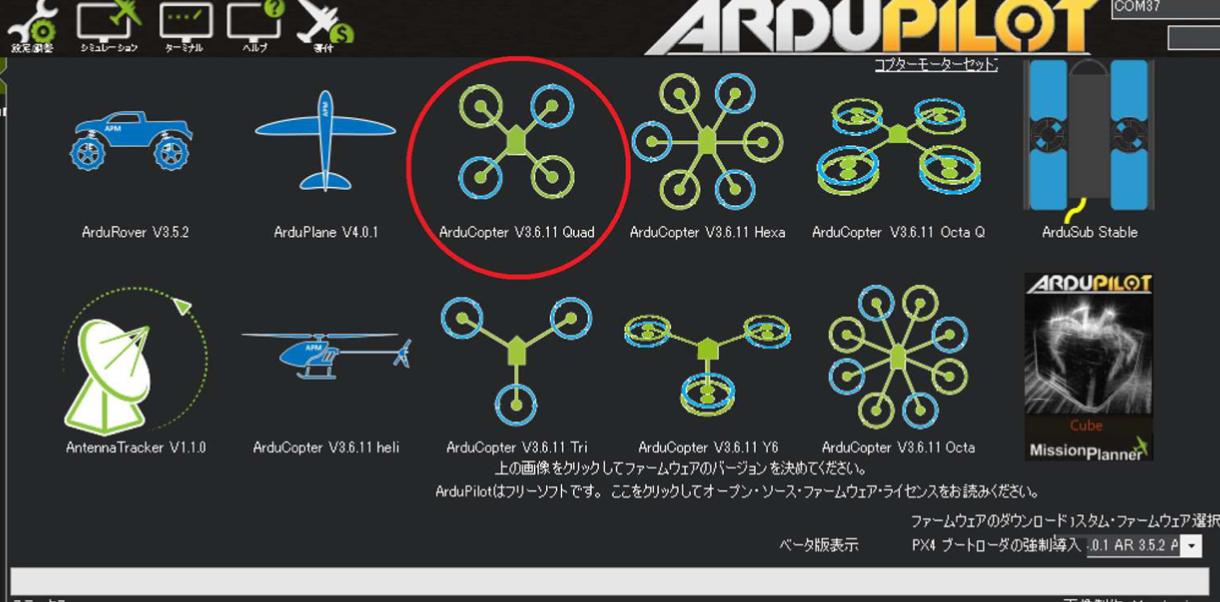
ドローンはプロペラの回転方向が全部同じではない。このスクリーンショットでわかるとおり、進行方向に対して左右は逆回転。後ろも逆回転である。
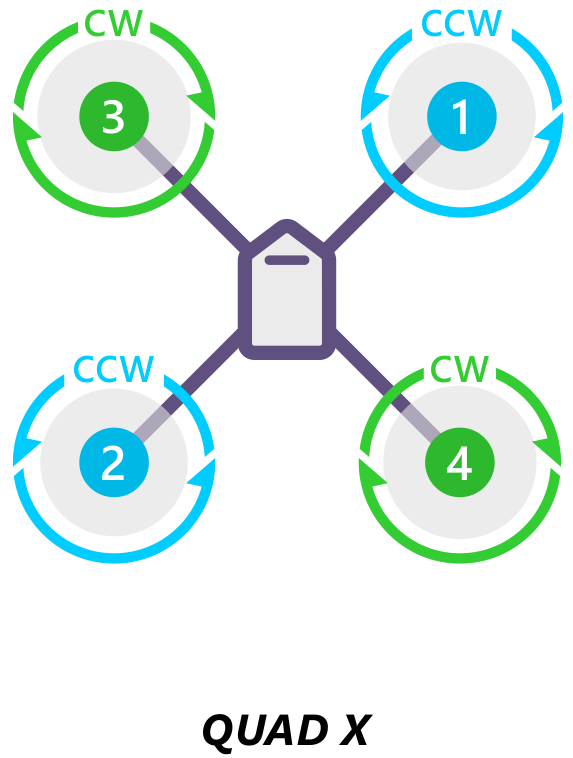
また、ドローンのモーターの配線は論理的には次のようになっているらしい。どれつないでも一応は動くようだ。
モーターは配線が同じだと同じ方向に回転し、CWもCCWもない。
しかし軸に切ってあるネジがCW(Clock Wise: 右回り)モーターは左回り、CCW(Counter Clock Wise: 左回転)モーターは右回りに切られている。
(なんでこんな大事なこと、誰も書かないんだろ?)
ESCと接続のテストをするため、PWMテスターがよく売られている。
こんな感じ。
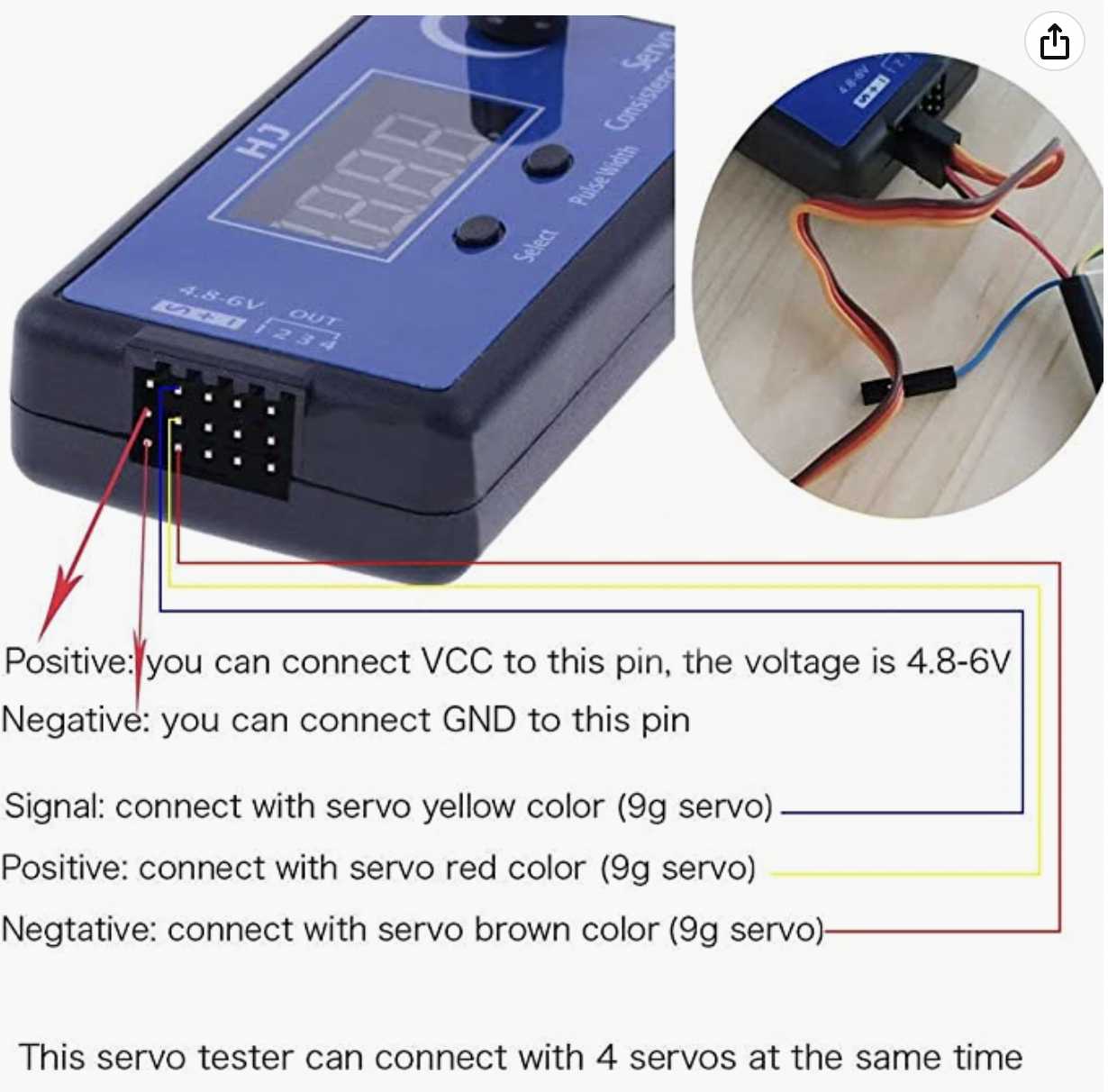
これはディスプレイにパルス数が出るタイプ。機体に電源を供給しESCを接続するだけでテストできる。ただ、テストだけでキャリブレーションには向かない。
私の場合は安定化電源につないでテストしている。これで、モーターとESCの接続でモーターの回転方向を決める。
プロペラはギリギリまで取り付けませんが、CWプロペラはCWモーターに、CCWプロペラはCCWモーターに、それぞれ正しく取り付ける。反対方向だとプロペラが外れる。
ESCと電源
ドローンはモーターを回すためには12V以上の電圧を必要とするが、制御系は5Vである。
このふたとおりの電源をどこから得るか?だが、通常、ブラシレスモーターをコントロールするESCはBEC(Battery Eliminator Circuitry)という制御系の電源を供給する機能がついている。BECは5V 2A程度を供給できるので、ESCの制御をフライトコントローラーに接続すれば電源の問題は解決する。
BEC機能がない場合、電源配電盤で5V出力があるものを採用する。
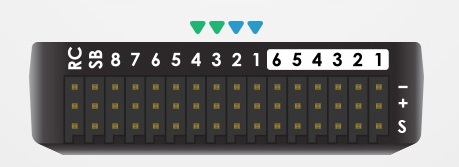
モーター4つの場合、番号にしたがって次の場所にESCケーブルを接続する。
ESCキャリブレーションについてはメチャクチャ苦労したので、別記事にまとめました。
フライトコントローラー
フライトコントローラーを組み立て、配線し、ドローンに固定しなければならない。
FacebookのArdupilotでベストのフライトコントローラーを聞いたらCube Orangeだったのでそれにした。
空を飛ぶには性能のいいフライトコントローラーのほうがよいのはたしかです。
CubeシリーズとPixHawkはコネクターに互換性がないので注意してください。
というよりもCubeシリーズは独自のHere Linkワールドを作っているのでオススメしません。
私は空飛ぶドローンだけで使っていて、他はPixHawkです。
フライトコントローラーの固定の方法が説明書のない中華製のキットの悲しさなんだけど、やっぱりこのようにマウントを組み立て、両面接着テープでPixHawkを固定するようです。

ライトコントローラーCube Orangeにはオレンジ色の箱内にインシュレーターがついているという触れ込みだが、信用できないのでやっぱりマウントに載せる。

CPUの処理速度が早いので、フライトコントローラー上でいろいろ動かせるのでよいとのこと。
近年だと、STM32 F746(通称F7)が早いそうだ。
他の機体が近づいたら避けるなどの機能がある。
フライトコントローラーにファームウェアを書き込む
フレームにGPSを固定し、フライトコントローラーを取り付ける、が、その前にファームウェアを書き込む必要がある。
WindowsマシンにArdupilotのMission Plannerをインストールする。
Mission Plannerは2022年あたりではWindowsでないとまともに動かない。
USBでPixHawkと接続し、ファームウェアインストールを選び、適合する機種を選んで「アップデート」
Cube Orangeは迷うことがないはず。
問題はPixhawkにファームを書き込む場合で、普通のPixhawkはまずpxhawk1-1mをトライしてみてください。
メモリー容量が小さいとか出てきたら、pxhawk1をアップロードします。
pixhawk本体に2.4.8と書いてあったら、fmuv2をアップロードしてください。明確に書いてありませんが、これで動きます。
バスにつながるもの
バスとは、いろいろなデータが乗り合わせるのでバスという。
次ようなプロトコルがドローンシリアルバスでは使われている。
SPI (用途:ジャイロ、加速度計)
基板上のパーツと通信するプロトコル
I2C(用途:コンパス、気圧計)
遅いといわれるが、SPIと同様基板上の通信で使われる
UART (用途:GPS,受信機)
本当のシリアル通信
ジャイロ
ジャイロセンサーはフライトコントローラーにすでに搭載されていることが多く、姿勢制御に使われる。
コンパスと一体化したモジュールもある。
気圧計
これもフライトコントローラーに内蔵されていることが多い。飛行高度を測定するために使う。
GPS
PixHawkにはいろいろ繋ぐのだけれど、GPSは普通こんな感じでつないでいる。

PixHawk用GPSの中には平気で5ピンというありえないものが混ざっているので買う前に注意しましょう。
フライトコントローラーのベンツ、Cube Orangeの場合、コネクターの関係で普通Here3+を買うはめになります。これはGPSに挿すのではなく、CAN1に挿します。CAN2用コネクターもついてますが、使いません。マニュアルはここ
以下のパラメーターリストで以下を設定し、「パラメータ書込」ボタンを押すこと。
コンパスは外部のものを使ったほうが正確です。最大の理由は機体の金属部品が集まっているのがフライトコントローラー周辺だから。だから内部のコンパスはオフにする.
バッテリー
飛行するドローンの電池こそ最先端技術が使われます。
なぜならば、できるだけ電力を蓄え、大きい電流が取り出せ、すぐに充電できるという究極の電池が求められているから。
現在のチャンピオンは、リチウムポリマー電池(Li-Po)
しかし、リチウムポリマー(リポと略されることが多い)電池は爆発しやすいです。
ニュースになりませんが、ドローン関係者の間では「充電は圧力鍋の中でやれ」なんていわれるほど危険です。
急速充電は可能な限り避けましょう。
爆発しやすいので「バランス充電」といいひとつずつのセルごとに電圧を管理し、充電する充電器が多いし、推奨です。
これを使えば大幅に爆発のリスクを減らせる(リスクが「ない」とは書いていません)
他にはリチウムフェライト(Li-Fe)、ニッケル水素(Ni-MH)があります。
放電許容量を示す値にC(CmA シーミリアンペア)というものがあります。たとえば容量1000mAhの能力をもったバッテリーが50Cだとしましょう。
1000mA x 50C = 50Aとなり、瞬間的には50Aの供給も可能だということを示しています。
ただし、充電時はもちろん1Cで行います。
ちなみに、車でなじみのある鉛蓄電池はこの世界では非力です。
12V50Ahなんてのが自動車のバッテリーではポピュラーだと思うけど、リチウム電池の標準ともいえる18650電池は一本で3Ah
4本で14.8V。68本の組み合わせで同等となる。重量でだいたい3.4Kg。
電池は隙間に並べられるので、鉛蓄電池は選ばれない。
ちなみにEVには約5000本の電池が積まれています。
送信機、受信機
送信機の操作
![]()
左右にふたつのスティックは送信機で目立つと思う。
モード2というドローンの操作では右スティックが前後左右、
左スティックが上下旋回。
わかりやすく言えば、右手が二次元、左手が3次元。
モード1というのはラジコン時代のスティックへの割当で今は塀rつつあるようです。
使う電波は免許が不要なのは、2.4GHz帯のISMバンドを使う場合です。ただし、この帯域はWi-Fi, Bluetooth, 電子レンジなど激混みで混信する可能性は高いです。
私はアマチュア無線の免許と第三級陸上特殊無線(三陸特)ももっていますが、この免許を使う場合、ドローンを移動局として登録し、無線局を開局しないといけません。めんどくさいのでやりません。
FF-i6は受信機側に付属品のループした電線をセットし、送信機の「Bind」ボタンを押しながら電源を入れます。
一秒もかからずバインドが完了するはずです。
終わったら、忘れずループした電線をぬきましょう。
受信機
Flysky FS-IA6Bというのは受信機です。
ドローン製作のなにに悩むかって、このようにインターフェースについての情報がなにもないんです。
FS-IA6BとPixhawkの接続については書かれているものが少ないので別記事を書きました。
勉強のため日本での標準 FUTABA製プロポを購入しました。
我が家の近所には日本で唯一かもしれないドローンの専門店があります。
そこでT10送信機とR2000レシーバーの古いキットが25,000円で売られていたので即買いしました。
あっさりPixhawkとS-BUSで繋がり、Mission Plannerで状況を把握できました。